Problemstellung
Gerade bei Erdbeobachtungsatelliten ist der Trend zu immer höheren Anforderungen an die Ausrichtgenauigkeit untrennbar mit der Notwendigkeit von immer größerer Agilität verbunden. Der Begriff „Agilität“ bezeichnet hier die Fähigkeit eines Satelliten, schnelle Rotationsmanöver durchzuführen. Die dazu erforderlichen hohen Drehmomente übersteigen typischerweise die Kapazitäten klassischer Reaktionsräder, sodass mit sogenannten Control Moment Gyroscopes (CMGs) stärkere Aktuatoren notwendig sind.
Zu den zentralen Herausforderungen bei der Regelung agiler Satelliten gehört die Ansteuerung der CMGs, die sowohl eine nichtlineare Dynamik als auch singuläre Konfigurationen, in denen die Steuerbarkeit um bestimmte Richtungen verloren geht, aufweisen. Darüber hinaus ist die Beobachtung vordefinierter Regionen auf der Erdoberfläche ein inhärent zeitvariantes Problem, da sowohl die Solllage als auch die Solldrehrate des Satelliten stark von der momentanen Position und Geschwindigkeit des Satelliten auf seinem Orbit abhängen.
Zurzeit werden am iFR im Rahmen der DLR-finanzierten Verbundprojekte „HOREOS agil“ (HOchgenaue REgelung Optischer Satellitensysteme unter Agilität) und „HOREOS agad“ (HOREOS agil advanced) in Kooperation mit Airbus Defence and Space in Friedrichshafen Lageregelungs- und Ansteuerungsalgorithmen für agile Satelliten mit CMGs entwickelt. Ein Flyer mit einer Zusammenfassung dieser Projekte kann hier heruntergeladen werden.
Methoden und Werkzeuge
- multidisziplinäre Modellbildung
- Reglerentwurf für nichtlineare Mehrgrößensysteme
- Robustheitsanalyse hinsichtlich Stabilität und Regelgüte
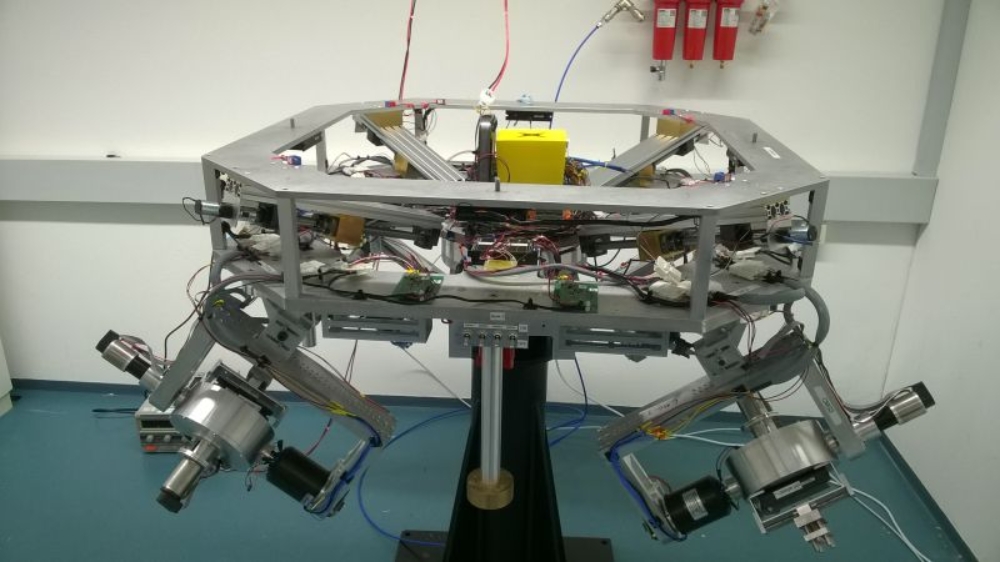
- Skalierung und Ähnlichkeitsmechanik
- Verifikation durch Simulationen und Hardwareexperimente
Veröffentlichungen
- Geshnizjani, A. Kornienko, T. Ziegler, J. Löhr, and W. Fichter, “Optimal Initial Gimbal Angles for Agile Slew Maneuvers with Control Moment Gyroscopes”, in AIAA SCITECH 2019 Forum, San Diego, USA, 2019.
- Geshnizjani, B. Freudenau, and W. Fichter, “Scaled Verification Scenarios for Agile AOCS Testbeds”, in 67. Deutscher Luft- und Raumfahrtkongress, Friedrichshafen, 2018.
- Kornienko, P. Dhole, R. Geshnizjani, P. Jamparueang, and W. Fichter, “Determining Spacecraft Moment of Inertia using In-Orbit Data”, in 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 2017.
- Geshnizjani, A. Kornienko, and W. Fichter, “Angular Momentum Based Steering Approach for Control Moment Gyroscopes,” in 20th IFAC Symposium on Automatic Control in Aerospace, Sherbrooke, Canada, 2016.
- Kornienko, J. Rieber, T. Ott, R. Geshnizjani, W. Fichter, J. Forshaw, and G. Aglietti, “Experimental Verification of Attitude Control System for Agile Spacecraft,” in 20th IFAC Symposion on Automatic Control in Aerospace, Sherbrooke, Canada, 2016.
- Bamber, J. Forshaw, T. Frame, G. Aglietti, R. Geshnizjani, S. Goerries, A. Kornienko, J. Levenhagen, Y. Gao, and A. Chanik, “Absolute Attitude Determination System for a Spherical Air Bearing Testbed,” 66th International Astronautical Congress, Jerusalem, Israel, 2015.e
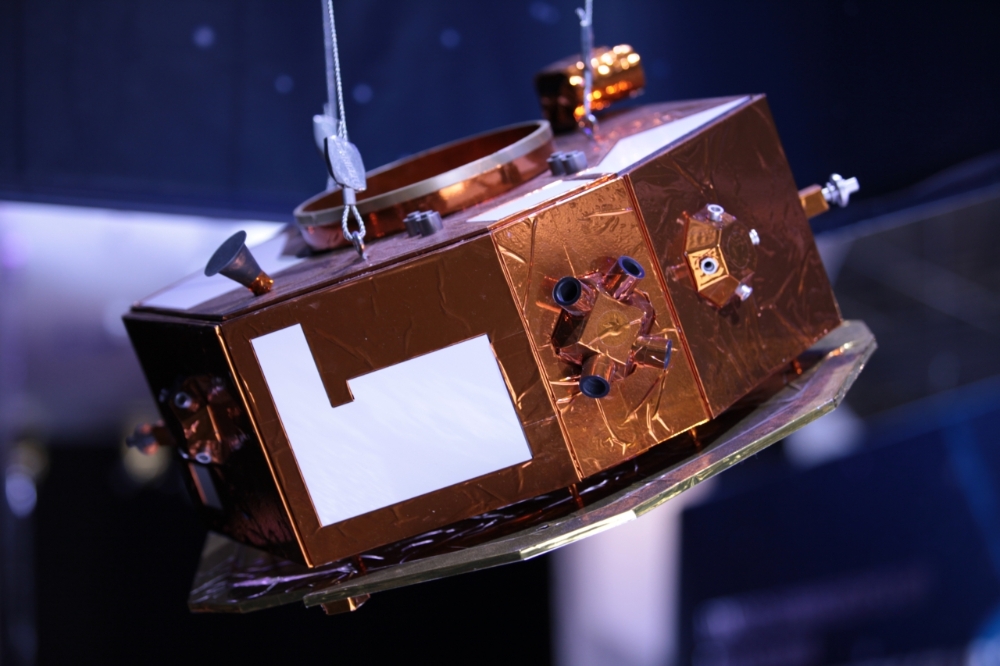
LISA Pathfinder (LPF) ist ein Satellit zur Technologiedemonstration, der über ein Jahrzehnt lang entwickelt und 2015 zum Lagrangepunkt L1 des Erde-Sonne-Systems gestartet wurde. Ziel von LPF ist/war die Demonstration von erforderlichen Technologien für wissenschaftliche Missionen zur Grundlagenforschung in Physik, Kosmologie und Geodäsie. Eine der Schlüsseltechnologien ist dabei das sogenannte „drag-free“-Regelungssystem, mit welchem zwei Testmassen innerhalb ihrer Gehäuse im freien Fall „gehalten“ werden können. Die Minimierung von nicht-gravitativen Beschleunigungen erfolgt dabei mit einer Genauigkeit, die die Messung von Gravitationswellen erlaubt. Für diese Aufgabe musste ein Regelungssystem mit 15 mechanischen Freiheitsgraden entwickelt werden, welches in seinen Grundzügen von Prof. Fichter noch während seiner Zeit in der Raumfahrtindustrie formuliert wurde. Später trugen mehrere Doktoranden des iFR zur Entwicklung von LPF bei:
- Robuster Reglerentwurf für die drag-free-, Aufhängungs- und Lageregler
- Entwicklung eines Software-Werkzeugs für Robustheitsanalysen für Systeme mit vielen unsicheren und nichtlinear gekoppelten Parametern
- Methoden zur Parameterschätzung für die Steifigkeit der Testmassen
- Entwurf des „drift mode“ für die wissenschaftliche Missionsphase ohne elektrostatische Aufhängung
Das drag-free-Regelungssystem von LISA Pathfinder ist das präziseste drag-free-System der Welt sowie das einzige mit würfelförmigen Testmassen. Mehr Informationen zur Mission finden Sie auf der ESA-Seite zum Projekt (http://sci.esa.int/lisa-pathfinder/).
Ausgewählte Veröffentlichungen
- Armano, H. Audley, G. Auger, J. Baird, M. Bassan, P. Binetruy, M. Born, D. Bortoluzzi, N. Brandt, M. Caleno, and others, “Sub-Femto-g Free Fall for Space-Based Gravitational Wave Observatories: LISA Pathfinder Results,” Physical Review Letters, vol. 116, no. 23, p. 231101, 2016.
- Antonucci, M. Armano, H. Audley, G. Auger, M. Benedetti, P. Binetruy, J. Bogenstahl, D. Bortoluzzi, P. Bosetti, N. Brandt, and others, “The lisa pathfinder mission,” Classical and Quantum Gravity, vol. 29, no. 12, p. 124014, 2012.
- Antonucci, M. Armano, H. Audley, G. Auger, M. Benedetti, P. Binetruy, C. Boatella, J. Bogenstahl, D. Bortoluzzi, P. Bosetti, and others, “LISA Pathfinder data analysis,” Classical and Quantum Gravity, vol. 28, no. 9, p. 094006, 2011.