Algorithmen zur Flugregelung und Bahnplanung
Anwendungen
Durch ihren vergleichsweise niedrigen Energiebedarf sind Flächenflug-UAVs Multicoptern bei Anwendungen überlegen, die eine lange Flugzeit oder große Reichweite voraussetzen, wie beispielsweise zur Rettung oder Gebietsüberwachung. Um Flächenflug-UAVs jedoch sicher und effizient in komplexen Umgebungen betreiben zu können, wird eine hochgenaue Trajektorienplanung und Bahnfolgeregelung benötigt. Diese Anforderungen werden von einfachen UAV-Autopiloten zur Wegpunktfolge in der Regel nicht erfüllt.
Algorithmen
Am iFR wurde ein Verfahren zur exakten Planung und Bahnfolgeregelung fliegbarer, Spline-basierter 3D Trajektorien entwickelt. Die Verwendung und Erweiterung von Dubins-Pfaden um Euler-Spiralen garantiert dabei stetige Krümmungsverläufe (C2-Kontinuität) und ermöglicht die Berücksichtigung von Leistungsgrenzen. Gleichzeitig erlaubt eine Parametrisierung der Trajektorien durch kubische Splines und eine Flachheit-basierte Systemformulierung die Generierung von Feedforward-Signalen zur Verbesserung des Bahnfolgeverhaltens. Das Verfahren ermöglicht damit eine effiziente Planung fliegbarer 3D Trajektorien sowie deren hochgenaues Tracking. Durch nichtlineare dynamische Inversion wird außerdem eine global stabile Bahnfolgeregelung erreicht.
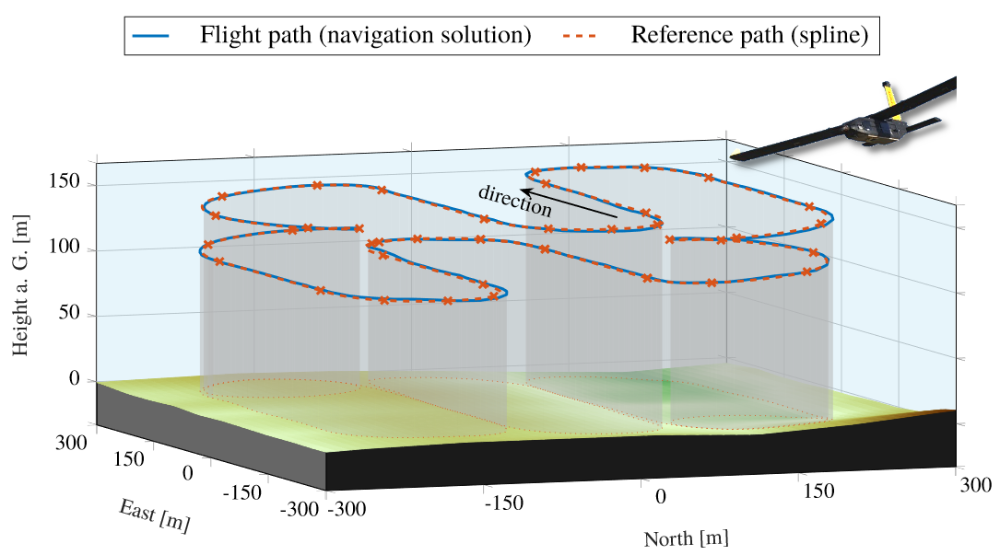
Statt kaskadierter PID Eingrößenregler zur Raten- und Lageregelung wurde ein Zustandsregler entworfen, der eine direkte Polvorgabe für Längs- und Seitenbewegung ermöglicht. Flugergebnisse (Bild oben) zeigen die hohe Bahnfolgegenauigkeit des kompletten Ansatzes.
Publikationen
[1] Fichter, W. und Stephan, J., Flugregelung-Theoretische Grundlagen für die Lenkung und Regelung von Flächenflugzeugen, https://link.springer.com/book/10.1007/978-3-662-60907-1
[2]Pinchetti, A. Joos and W. Fichter, „Efficient Continuous Curvature Path Generation with Pseudo-Parametrized Algebraic Splines” in CEAS Aeronautical Journal, Vol. 9, No. 4, pp. 557–570, 2018
[3]Stephan, O. Pfeifle, S. Notter, F. Pinchetti and W. Fichter, „Precise Tracking of Extended Three-Dimensional Dubins Paths for Fixed-Wing Aircraft“ in Journal of Guidance, Control, and Dynamics, Vol. 43, No. 12, pp. 2399-2405, 2020