Problem Statement
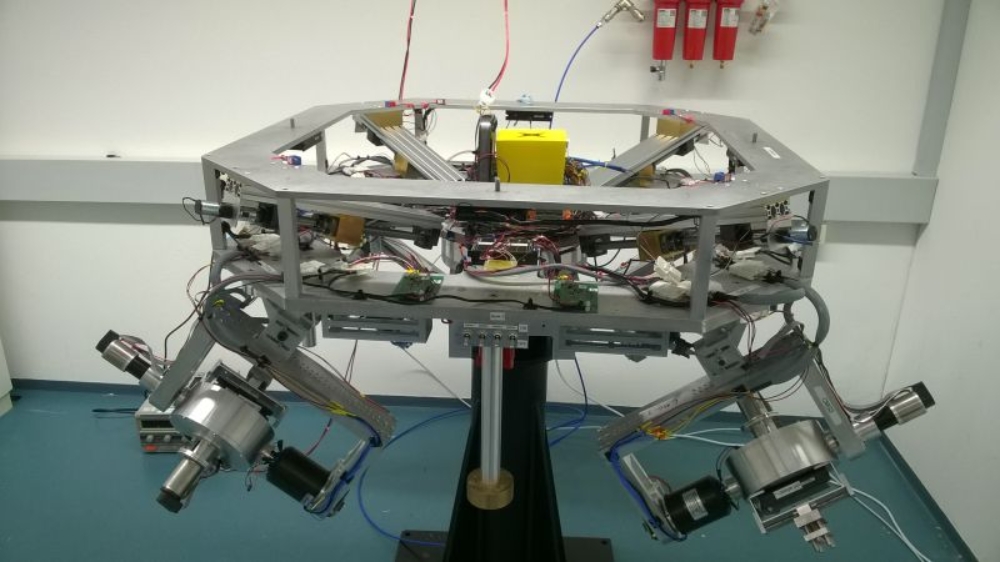
For Earth observation satellites, more stringent accuracy requirements go hand in hand with higher agility requirements. Here, the term “agility” refers to a satellite’s ability to perform fast (and possibly large-angle) reorientation maneuvers, which in turn leads to high torque demands. These torque demands are typically too high for reaction wheels to realize, hence so-called control moment gyroscopes (CMGs) are the actuators of choice for agile satellites.
Among the central challenges regarding the control of agile satellites is the commanding of the CMGs with their nonlinear dynamical properties as well as the existence of singular configurations where the controllability of the satellite around a certain direction is lost. Furthermore, the observation of predefined surface areas is an inherently time-varying problem as both the reference attitude and the reference rate for the satellite to follow depend on its current orbital position and velocity.
Currently, the iFR is developing attitude control and steering algorithms for agile satellites with CMGs in cooperation with Airbus Defence and Space in Friedrichshafen in the DLR-funded joint research projects “HOREOS agile” (High Optical Resolution Earth Observation Satellite under agility constraints) and “HOREOS agad” (HOREOS agile advanced). A flyer containing a brief summary of the projects can be downloaded here.
Methods and Tools
- Multidisciplinary modeling
- Controller design for nonlinear systems
- Robust stability and robust performance analysis
- Scaling and similitude
- Verification via simulations and hardware experiments
Publications
- Geshnizjani, A. Kornienko, T. Ziegler, J. Löhr, and W. Fichter, “Optimal Initial Gimbal Angles for Agile Slew Maneuvers with Control Moment Gyroscopes”, in AIAA SCITECH 2019 Forum, San Diego, USA, 2019.
- Geshnizjani, B. Freudenau, and W. Fichter, “Scaled Verification Scenarios for Agile AOCS Testbeds”, in 67. Deutscher Luft- und Raumfahrtkongress, Friedrichshafen, 2018.
- Kornienko, P. Dhole, R. Geshnizjani, P. Jamparueang, and W. Fichter, “Determining Spacecraft Moment of Inertia using In-Orbit Data”, in 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 2017.
- Geshnizjani, A. Kornienko, and W. Fichter, “Angular Momentum Based Steering Approach for Control Moment Gyroscopes,” in 20th IFAC Symposium on Automatic Control in Aerospace, Sherbrooke, Canada, 2016.
- Kornienko, J. Rieber, T. Ott, R. Geshnizjani, W. Fichter, J. Forshaw, and G. Aglietti, “Experimental Verification of Attitude Control System for Agile Spacecraft,” in 20th IFAC Symposion on Automatic Control in Aerospace, Sherbrooke, Canada, 2016.
- Bamber, J. Forshaw, T. Frame, G. Aglietti, R. Geshnizjani, S. Goerries, A. Kornienko, J. Levenhagen, Y. Gao, and A. Chanik, “Absolute Attitude Determination System for a Spherical Air Bearing Testbed,” 66th International Astronautical Congress, Jerusalem, Israel, 2015.
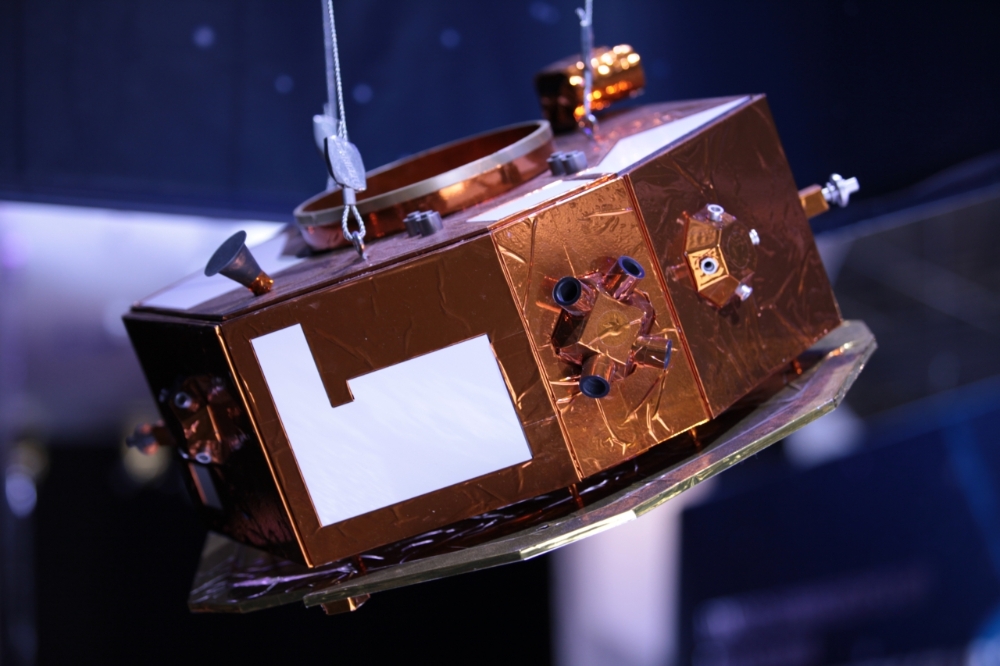
LISA Pathfinder (LPF) is a technology satellite that was developed over more than one decade and launched in 2015. It was stationed at the Lagrange point L1 with the objective to demonstrate technologies that are required for science missions in the field of fundamental physics and geodesy. The so called drag-free control system is one of the key technologies. It aims at a free flight of two test masses within its housings, such that their residual non-gravitational accelerations are minimized. To this end a control system with 15 mechanical degrees of freedom had to be developed. The fundamental design was formulated by Prof. Fichter while he was still working in industry. Later, several Ph.D. students contributed to the development of LPF.
- Robust control design of drag-free, suspension, and attitude controllers
- Development of robust performance analysis tools for a large number of uncertain and nonlinearly connected parameters
- Parameter estimation methods for the stiffness of the test masses
- Design of the drift mode, a science mode without electrostatic suspension
The drag-free control system of LISA pathfinder is the world’s most precise drag-free system, and the first system with cubic test masses. A more detailed description of the mission can be found here: Page of the LPF-project (http://sci.esa.int/lisa-pathfinder/).
Publications
- Armano, H. Audley, G. Auger, J. Baird, M. Bassan, P. Binetruy, M. Born, D. Bortoluzzi, N. Brandt, M. Caleno, and others, “Sub-Femto-g Free Fall for Space-Based Gravitational Wave Observatories: LISA Pathfinder Results,” Physical Review Letters, vol. 116, no. 23, p. 231101, 2016.
- Antonucci, M. Armano, H. Audley, G. Auger, M. Benedetti, P. Binetruy, J. Bogenstahl, D. Bortoluzzi, P. Bosetti, N. Brandt, and others, “The lisa pathfinder mission,” Classical and Quantum Gravity, vol. 29, no. 12, p. 124014, 2012.
- F. Antonucci, M. Armano, H. Audley, G. Auger, M. Benedetti, P. Binetruy, C. Boatella, J. Bogenstahl, D. Bortoluzzi, P. Bosetti, and others, “LISA Pathfinder data analysis,” Classical and Quantum Gravity, vol. 28, no. 9, p. 094006, 2011.